From Dances To Theatre
This past spring, the HIVE Lab collaborated with Prof. Emmy Weldon to develop an autonomous scenic unit for the Nevermore musical. In addition to developing a new experimental platform, we sought to learn more about each others’ design and engineering practices.
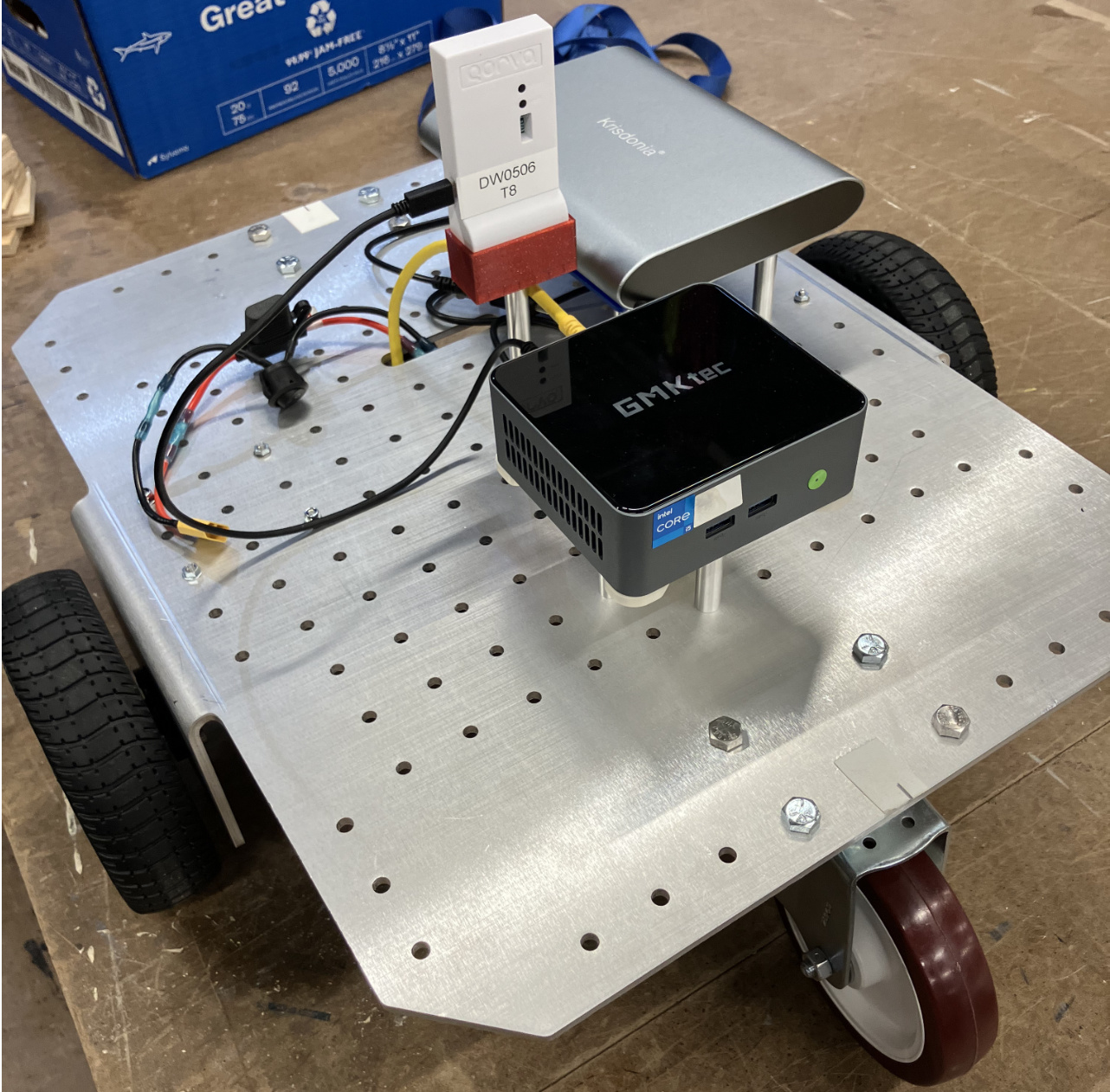
The autonomous robot platform, which we named Eddie, is a remix of the ODrive Botwheel Explorer platform. The drive train and low level controls are similar; however, we extended the chassis and added an additional caster wheel. The robot autonomy system is composed of a NUC-like computer, an indoor positioning sensor, and lithium battery.
The deathbed wagon that Eddie is embedded into was design to hold a human at an incline. There were moments designed in the performance where this autonomous deathbed would “float” the actor away from thes stage. Additionally, this wagon would contribute to other visual aesthetics in the performance when not moving humans.

Though the musical did not run, we learned several important lessons through the development process!
- Performing on a large stage needs to be treated like an off-road navigation challenge. The gaps between trap doors and solid groups provide tricky spots for the robot to traverse.
- Our designs were solid in isolation, but the coupling of the scenic wagon to the robot amplified the issues with uneven floors.
- Incorporating additional sensors in a mecahnically modular way remains a challenge.
We will iterate on the robot design through the fall and try again with a one Act demo play in Spring 2027.